移動型ベースロボット
移動型ベースロボット
SCIBOT
サービスロボット等でご利用頂ける駆動装置をご提供します。 ロボット開発される方におかれましては、開発コスト及び工期の削減が図れます。また、電源供給・各種センサー入力が可能なインタフェースを準備しております。

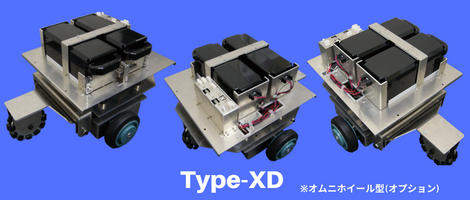
<Type-XD>
特徴
- 1、定点回転可能
- 2、傾斜角度10度登坂及び段差20mm乗り越え可能
- 3、各種外部センサー接続可能※オプション対応
製品仕様
| 型番 | Type-XD | ||
| 上位機器接続 | USB2.0準拠 | ||
| 駆動方式 | 左右独立駆動 ※モーターをブレーキ付きに変更可能(オプション) |
||
| 駆動輪 | 黒ゴムタイヤ 直径125mm ※白ゴムまたはウレタンタイヤへ変更可能(オプション) |
||
| キャスター | 前後輪自在型 ※オムニホイール型へ変更可能(オプション) |
||
| タイヤサイズ | 直径125mm | ||
| 走行速度 | 0~5km/h ※モーター変更で最高速度の変更可能(オプション) |
||
| バッテリー | 24V 5.3Ah(2個搭載可能) | ||
| 環境 | 屋内 | ||
| 積載重量 | 最大40kg(床面の状態で可変) | ||
| 外部電源出力 (外部PC、機器向け) |
① 5V 0.5A(2系統) ②12V 1A(1系統) 19V 4A(2系統) |
||
| 各種センサー入力機能 | ①測距センサー (5ch) ②9軸センサー (1ch) ③バンパーセンサー(4ch) ④床無しセンサー (4ch) |
||
| 外形寸法 縦 横 高さ |
520mm | ||
| 440mm | |||
| 320mm | |||
| 本体重量 (バッテリー含まず) |
16.3kg | ||
※各種センサー入力についてはオプションとなります。別途お問い合わせください。
< Type-L 搬送台車型>

特徴
- 1、定点回転可能
- 2、各種外部センサー接続可 ※※要ご相談
- 3、傾斜角度6度登坂及び段差25mm乗り越え可能
製品仕様
| 型番 | Type-L | |
| 上位機器接続 | USB2.0準拠 | |
| 駆動方式 | 左右独立駆動(前後輪オムニホイル) | |
| 駆動輪サイズ | 直径250mm | |
| 自在キャスター | 前輪150mm 後輪200mm | |
| 走行速度 | 0~5.5km/h | |
| バッテリー | ①鉛蓄電池 DC24V 36Ah ②リチウムイオン電池 DC24V 22Ah |
|
| モーター | 200W | |
| トルク | ギヤ比15:1 8.33N・m×2 | |
| エンコーダ | 1024パルス | |
| 使用環境 | 屋内(屋根付き屋外) | |
| 各種センサー入力 | ①測距センサー (5ch) ②バンパーセンサー(4ch) |
|
| 重量(バッテリーで異なる) | 120kg ~ 130kg | |
| 外形寸法 縦 横 × 高さ |
1000mm | |
| 600mm×475mm | ||
| 積載重量 | ~200kg |
|
| 外部電源出力 (外部PC、機器向け) |
① 5V×2 (1口×1A) ②12V×1 (1口×1A) ③19V×2 (1口×4A) |
|
適用例